Collision of Ellipses¶
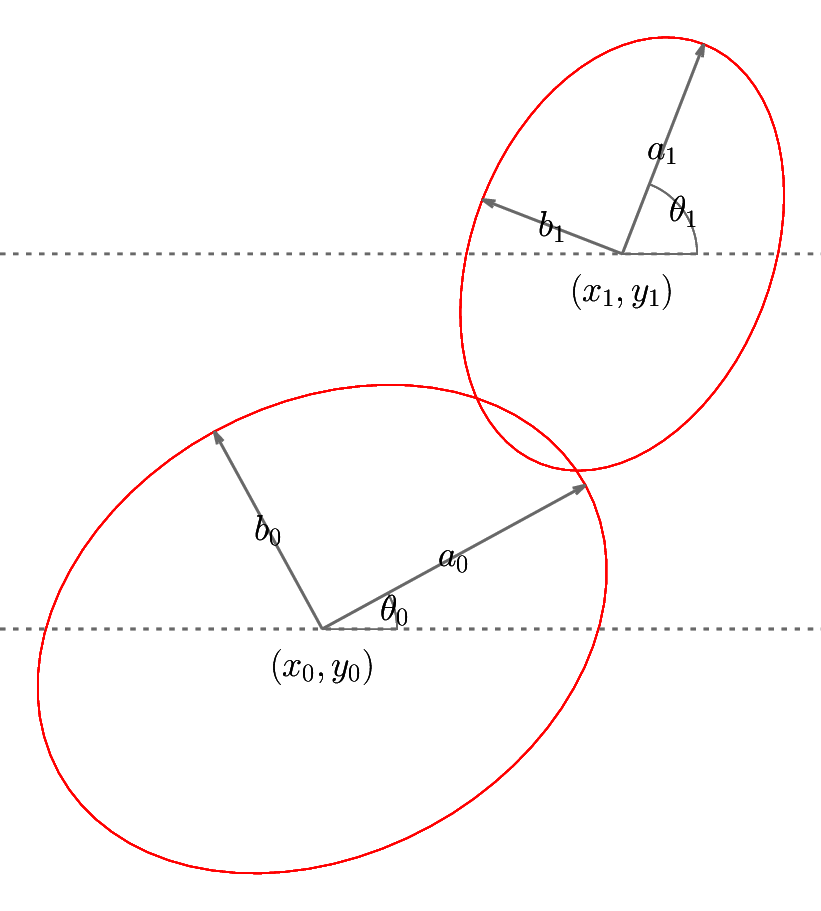
In this part I consider the collisions between two ellipses; namely, in this picture:
I aim at investigating
whether the two ellipses collide,
if they do, how much the penetration depth \(\delta\) is.
I assume the ellipses are completely smooth and rigid (i.e. no deformation), and \(\delta\) is sufficiently small compared to the size of the ellipses.
Note
This is a rough solution to obtain something plausible just to avoid the over-penetration between objects. Neither the collision detection nor the quantification of \(\delta\) are rigorous.
See also
Problem setup¶
An ellipse whose center is at the origin and the major / minor axes are \(a_0\) and \(b_0\) is given by
By introducing a parameter \(t_0\), this equation reads
To take into account the rotation of \(\theta_0\) and off-centred objects whose centre is at \(\left( x_0, y_0 \right)\), I modify the equation as
Hereafter subscripts \(0,1\) are used to distinguish the two ellipses.
The collision / intersection of the two ellipses results in a quartic equation with respect to the intersecting point(s) \(x\) (or \(y\)). The solution can be categorised as follows:
Four real solutions
Four intersecting points
Two real and two imaginary solutions
Two intersecting points
Four imaginary solutions
No Collision
And more
We are interested in distinguishing the second and the third cases. Note that the other cases are out of focus, since we assume that the collision depth is small enough.
Although we know a quartic formula, it is non-trivial to treat it numerically. Also, let’s say we obtain a theoretical solution; it is, however, still unclear how we define the penetration depth \(\delta\).
For these reasons, instead of solving quartic equations, I consider a simpler and approximated solution in this project.
Collision check using circular fitting¶
Although ellipses can rotate and be off-centered, by transforming the coordinate system:
we are able to say one object is at the origin and does not rotate (the major axis coincides with the Cartesian \(x\) axis).
Circular approximation¶
Note
This part is largely inspired by Simple Method for Distance to Ellipse.
Recall that I consider situations where \(\delta\) is much smaller than the sizes of the colliding objects. This allows me to think that collisions between two circles fitting the ellipses in the vicinity of the colliding points well approximates the collisions between ellipses.
Collisions between two circles are much simpler; the penetration depth of two circles (not a rigorous definition but one sound candidate) leads to
where \(r_0\) and \(r_1\) are radii of the two circles, and \(d\) is center-to-center distance.
Now the main focus is how to approximate an ellipse using a circle in a systematic way. Actually there is an analytical circle which approximates an ellipse locally:
which is known as evolute. The local curvature is given by
whose reciprocal is the radius of the circle fitting the original ellipse.
The only unknown is \(t\) which gives a circle nicely approximating the ellipse locally.
Finding a nice \(t\) is equal to find a normal vector from the point \(( x_p, y_p )\) to the ellipse, and also is equal to find the minimum distance to the ellipse.
Although these lemmas are not proved here, the following picture gives a good indication:
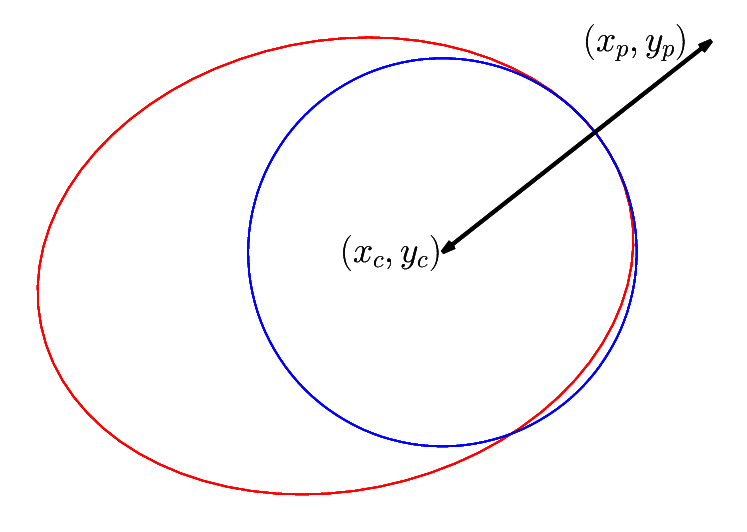
Here,
the black arrow connecting \(( x_p, y_p )\) and \(( x_c, y_c )\) gives a normal vector to the ellipse,
the fitted circle gives a good approximation of the ellipse locally.
Collision of two ellipses¶
I use the above method to quantify the penetration depth \(\delta\), which is very simple: for the ellipse \(i\), the center of the fitted circle of the ellipse \(j\) \(( x_{c_j}, y_{c_j} )\) is used as the target point \(( x_{p_i}, y_{p_i} )\) to fit a circle. This process is iterated until the locations of \(( x_{c_i}, y_{c_i} )\) converge.
When the two ellipses are colliding, the fitting circles lead
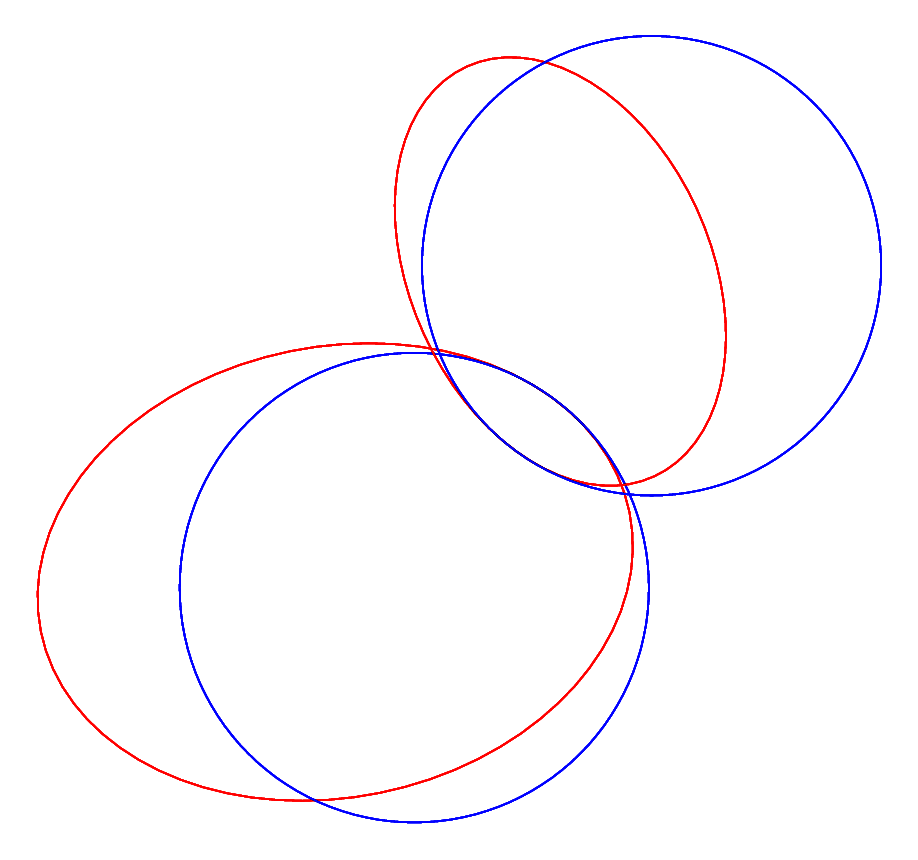
When the two ellipses are not colliding, the final state leads
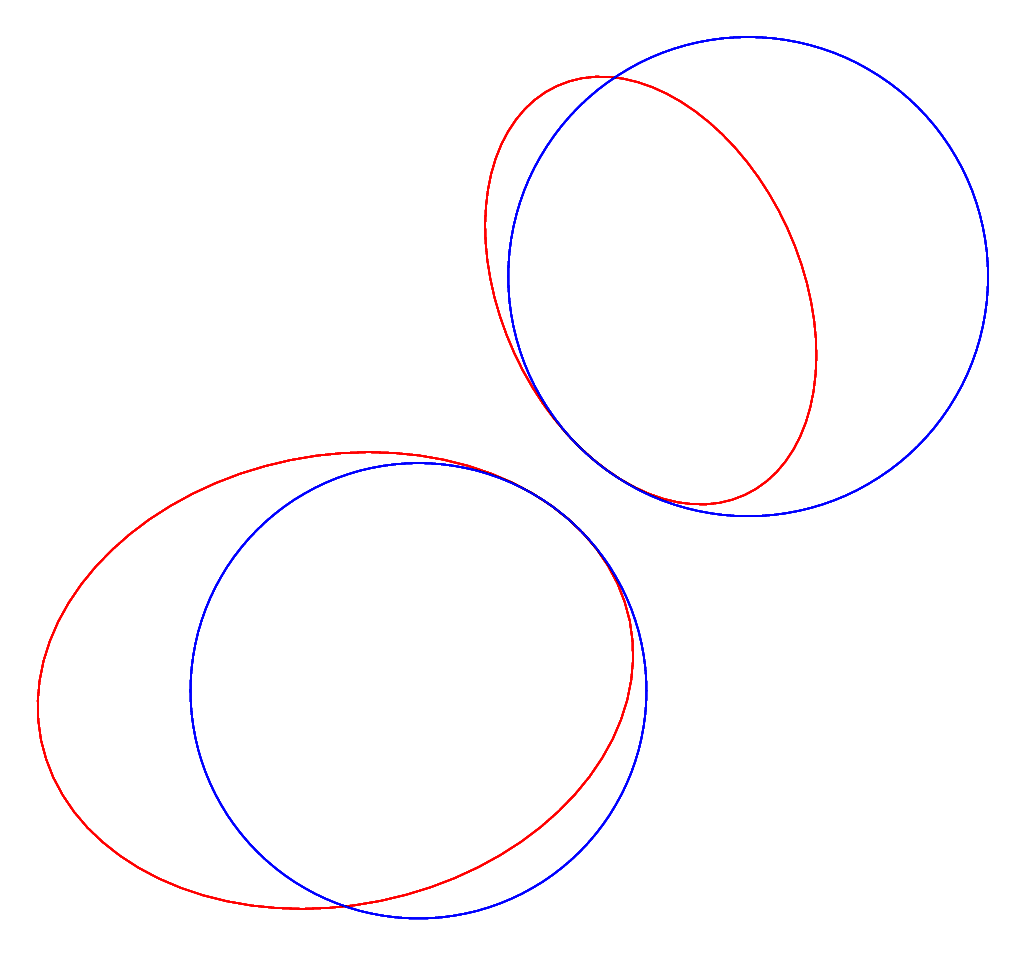
Since we now know nice circles, the penetration depth is simply
where, again, \(r_i\) are radii of the fitted circles, while \(d\) is the distance between the two centers of the fitting circles. Obviously two circles collide when \(\delta > 0\) and do not otherwise.
Stand-alone implementation¶
import numpy as np
from matplotlib import pyplot
from matplotlib import patches
def shift_and_rotate(disp, angle, p0):
# shift a point p0, then rotate it
# return the resulting point p1
p1 = dict()
x = p0["x"]+disp["x"]
y = p0["y"]+disp["y"]
p1["x"] = np.cos(angle)*x - np.sin(angle)*y
p1["y"] = np.sin(angle)*x + np.cos(angle)*y
return p1
def rotate_and_shift(disp, angle, p0):
# rotate a point (x0, y0), then shift it
# return the resulting point p1
p1 = dict()
x = p0["x"]
y = p0["y"]
p1["x"] = disp["x"] + np.cos(angle)*x - np.sin(angle)*y
p1["y"] = disp["y"] + np.sin(angle)*x + np.cos(angle)*y
return p1
def compute_evolute(e, t):
# compute center of evolute and radius of fitted circle
evolute = dict()
a = e["a"]
b = e["b"]
evolute["x"] = a*(1.-np.power(b/a, 2.))*np.power(np.cos(t), 3.)
evolute["y"] = b*(1.-np.power(a/b, 2.))*np.power(np.sin(t), 3.)
num = np.power(np.power(a*np.sin(t), 2.)+np.power(b*np.cos(t), 2.), 1.5)
den = a*b
evolute["r"] = num/den
return evolute
def find_normal_t(e, p):
# compute parameter t, with which a point (a*cos(t), b*sin(t))
# and the target point p gives a normal vector to the given ellipse
# ref: https://blog.chatfield.io/simple-method-for-distance-to-ellipse/
t = 0.25*np.pi
while True:
xe = e["a"]*np.cos(t)
ye = e["b"]*np.sin(t)
evolute = compute_evolute(e, t)
dxe = xe-evolute["x"]
dye = ye-evolute["y"]
dxp = abs(p["x"])-evolute["x"]
dyp = abs(p["y"])-evolute["y"]
norme = np.hypot(dxe, dye)
normp = np.hypot(dxp, dyp)
dc = norme*np.arcsin((dxe*dyp-dye*dxp)/(norme*normp))
dt = dc/np.sqrt(e["a"]**2.+e["b"]**2.-xe**2.-ye**2.)
t += dt
# limit in the first quadrant
t = min(t, 0.5*np.pi)
t = max(t, 0.)
if abs(dt) < 1.e-8:
break
# apply result to the other quadrants
if p["x"] < 0.:
t = -t+np.pi
if p["y"] < 0.:
t = -t
return t
def fit_circles(e0, e1):
# core function, fitting two circles
# read the documentation
for n in range(10):
if n == 0:
# initialise temporary evolute
p0 = {"x": e0["x"], "y": e0["y"]}
p1 = {"x": e1["x"], "y": e1["y"]}
# forward coordinate transform
disp = {"x": -e0["x"], "y": -e0["y"]}
angle = -e0["theta"]
p1_ = shift_and_rotate(disp, angle, p1)
# forward coordinate transform
disp = {"x": -e1["x"], "y": -e1["y"]}
angle = -e1["theta"]
p0_ = shift_and_rotate(disp, angle, p0)
# find optimum parameter t for each ellipse
e0_t = find_normal_t(e0, p1_)
e1_t = find_normal_t(e1, p0_)
# compute evolutes and their radii
evolute0_ = compute_evolute(e0, e0_t)
evolute1_ = compute_evolute(e1, e1_t)
# backward coordinate transform
disp = {"x": +e0["x"], "y": +e0["y"]}
angle = +e0["theta"]
p0 = rotate_and_shift(disp, angle, evolute0_)
# backward coordinate transform
disp = {"x": +e1["x"], "y": +e1["y"]}
angle = +e1["theta"]
p1 = rotate_and_shift(disp, angle, evolute1_)
evolute0 = {"x": p0["x"], "y": p0["y"], "r": evolute0_["r"]}
evolute1 = {"x": p1["x"], "y": p1["y"], "r": evolute1_["r"]}
return evolute0, evolute1
def plot_result(e0, e1, c0, c1):
# wrapper of matplotlib.patches to visualise
# resulting ellipses and fitted circles
def get_patch_of_ellipse(e):
x = e["x"]
y = e["y"]
width = 2.*e["a"]
height = 2.*e["b"]
angle = 180./np.pi*e["theta"]
keywords = {
"xy": (x, y),
"width": width,
"height": height,
"angle": angle,
"fc": "none",
"ec": "#FF0000",
}
return patches.Ellipse(**keywords)
def get_patch_of_circle(c):
x = c["x"]
y = c["y"]
radius = c["r"]
keywords = {
"xy": (x, y),
"radius": radius,
"fc": "none",
"ec": "#0000FF",
}
return patches.Circle(**keywords)
def compute_bounds(es, cs):
# determine plot ranges
# i.e., arguments of set_[xy]lim
xmin = +np.inf
xmax = -np.inf
ymin = +np.inf
ymax = -np.inf
for e in es:
xmin = min(xmin, e["x"]-max(e["a"], e["b"]))
xmax = max(xmax, e["x"]+max(e["a"], e["b"]))
ymin = min(ymin, e["y"]-max(e["a"], e["b"]))
ymax = max(ymax, e["y"]+max(e["a"], e["b"]))
for c in cs:
xmin = min(xmin, c["x"]-c["r"])
xmax = max(xmax, c["x"]+c["r"])
ymin = min(ymin, c["y"]-c["r"])
ymax = max(ymax, c["y"]+c["r"])
margin = 0.25
xmin -= margin
xmax += margin
ymin -= margin
ymax += margin
return (xmin, xmax), (ymin, ymax)
# prepare matplotlib objects
fig = pyplot.figure()
ax = fig.add_subplot(111)
# draw ellipses and circles
ax.add_patch(get_patch_of_ellipse(e0))
ax.add_patch(get_patch_of_ellipse(e1))
ax.add_patch(get_patch_of_circle(c0))
ax.add_patch(get_patch_of_circle(c1))
# set auxiliary parameters
xlim, ylim = compute_bounds([e0, e1], [c0, c1])
keywords = {
"xlim": xlim,
"ylim": ylim,
"aspect": "equal",
}
ax.set(**keywords)
# visualise
pyplot.show()
# clean-up
pyplot.close()
if __name__ == "__main__":
# initialise ellipses
e0 = {"a": 2.0, "b": 1.5, "x": 0.5, "y": 0.5, "theta": 0.2}
e1 = {"a": 1.5, "b": 1.0, "x": 2.0, "y": 2.5, "theta": 2.0}
# fit circles
c0, c1 = fit_circles(e0, e1)
# plot
plot_result(e0, e1, c0, c1)