Example¶
The results of the default case with \(N = 8\) are discussed below. All objects are horizontally aligned (\(\pos_{\ia} = 0\)) with a constant angular velocity:
such that a vertically-aligned and stationary state
is one (unstable) solution of the system.
To highlight the effect of the scheme, the energy-conserving scheme and the explicit scheme are compared.
Energy-conserving scheme¶
cargo run --release
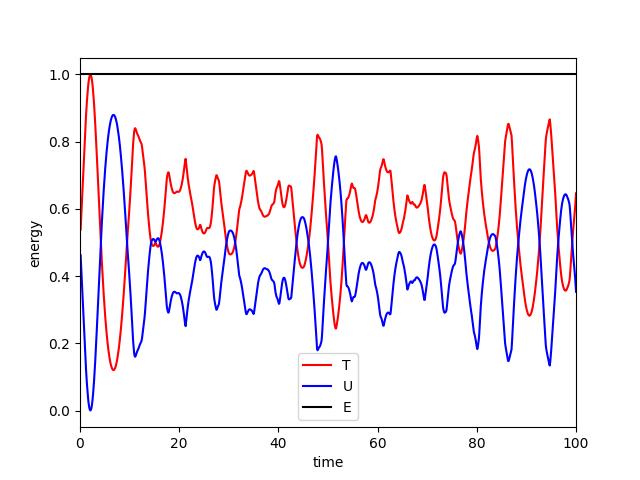
The kinetic energy (\(T\), red), the potential energy (\(U\), blue), and their sum (\(E\), black) are plotted as a function of time:
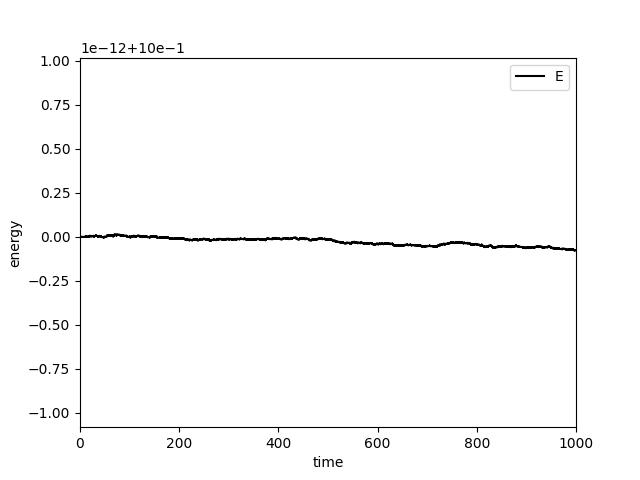
The deviation of the total energy is around the rounding error:
Explicit scheme¶
cargo run --release --features=explicit
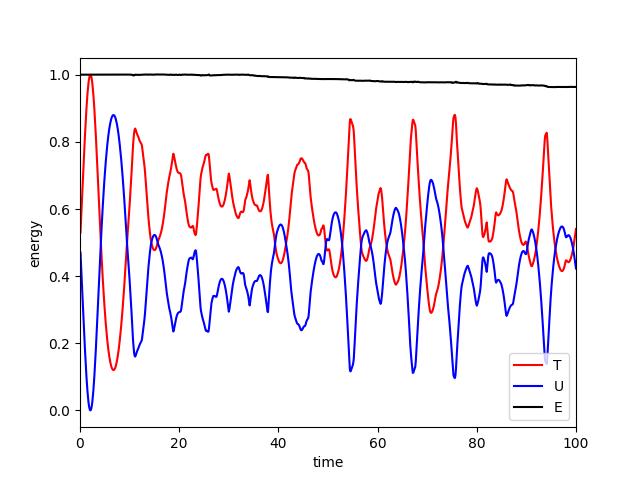
The deviation of the total energy is not around the rounding error:
Although this behaviour is improved when the angle is updated using the Crank-Nicolson scheme:
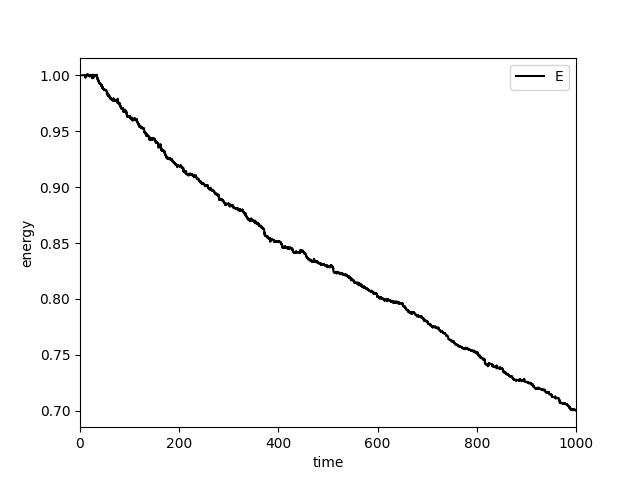
a clear decreasing trend is still observable. With the Euler explicit scheme:
on the other hand, a clear increasing trend is observed. In short, as long as a fully-explicit scheme is adopted to update the angular velocity, there is not way to conserve the total energy. A simple remedy is, of course, to make \(\delta t\) smaller.